



随着现代制造业的飞速发展,尤其是汽车、船舶、航空航天等精密制造领域的不断进步,对三维表面测量技术的需求日益增加。这些行业中的零部件往往具有复杂的几何形状和自由曲面,且生产批量大,传统的测量方法难以满足高精度、高效率的检测要求。因此,三维轮廓测量技术成为了现代制造业中不可或缺的一部分。结构光投影技术因其高速计算、高分辨率和全场数据采集的优势,逐渐成为三维表面测量的主流方法之一。该技术通过投影条纹图案并捕捉物体表面的反射光,利用相位信息重建物体的三维形状,广泛应用于工业检测、逆向工程、文化遗产保护等领域。
然而,尽管结构光投影技术在三维测量中表现出色,但在实际应用中仍面临诸多挑战,尤其是在高动态范围(HDR)物体表面的测量中。HDR物体表面的反射率分布复杂,不同区域的反射光强度差异较大,导致相机在捕捉条纹图案时容易出现局部过曝或欠曝现象。过曝区域的光强饱和,导致相位信息丢失;而欠曝区域则因光强不足,条纹对比度降低,影响测量精度。传统的方法通常通过多曝光合成技术来解决这一问题,即在不同曝光时间下拍摄多幅图像,然后合成一幅高质量的条纹图像。然而,这种方法需要拍摄大量图像,耗时较长,且无法量化曝光时间的影响,导致测量效率低下。
为了提升测量效率,研究者们提出了多种改进方案。例如,Ekstrand等人提出了自动曝光技术,通过分类物体表面的反射率来减少不同曝光时间的数量,从而提高测量效率。然而,这种方法在低反射率场景下的成像质量较差,难以应对复杂反射率分布的物体。此外,一些研究通过调整投影光强来解决HDR问题,如Waddington和Kofman提出的光强调节方法,通过修改投影光强避免图像饱和,并将不同光照条件下的图像进行融合。然而,这种方法在降低投影光强时可能导致条纹对比度下降,影响测量精度。
近年来,研究者们还尝试通过硬件改进来解决HDR问题,如使用偏振滤光片、彩色滤光片或多相机系统等。这些方法虽然在一定程度上提高了系统的动态范围,但增加了硬件成本和系统复杂度,且难以在实际应用中广泛推广。因此,如何在保证测量精度的前提下,减少图像采集数量、降低计算复杂度,并避免额外的硬件需求,成为了当前结构光投影技术研究中的一个重要课题。
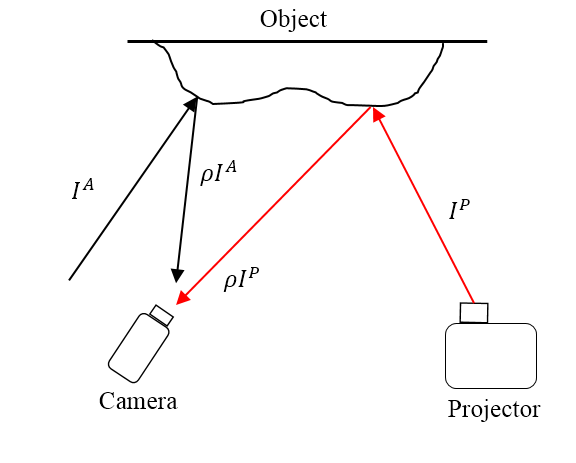
图1 条纹投影轮廓术原理图
针对以上问题,本研究提出了一种自适应投影光强优化方法首先,本文通过图1所示的条纹投影轮廓测量系统示意图,阐明了投影光强与相机捕捉亮度之间的关系。图中,Ip 表示投影光强,IA 表示环境光强,ρ表示物体表面的反射率。相机捕捉到的亮度由两部分组成:环境光ρIA和反射的投影光ρIp。基于这一关系,本文推导了相机响应函数,并通过投影一系列均匀灰度图像(如图2所示),计算每个像素的最佳投影光强。图2展示了不同投影亮度下的相机捕捉图像,从亮度为0到245的投影图像中,可以观察到随着投影亮度的增加,相机捕捉到的图像亮度逐渐增强。
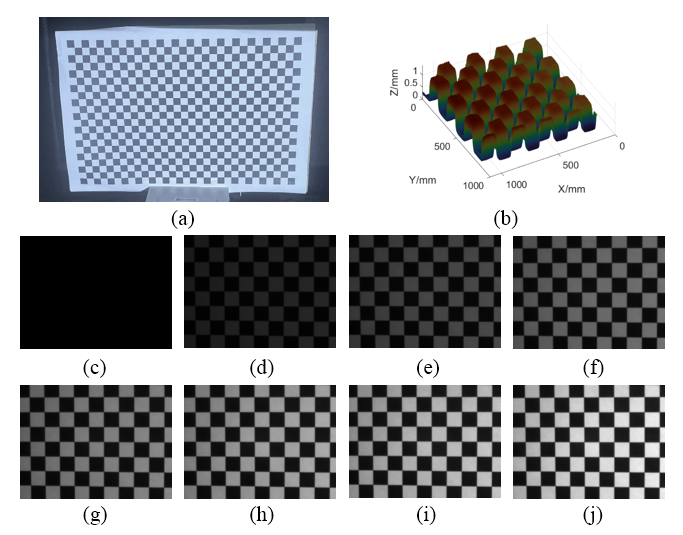
图2 最佳投射光强计算原理图
接着,本文利用多阈值Otsu算法对物体表面的反射率直方图进行分类。通过Otsu算法将反射率分布划分为多个簇,并计算出每个簇的最佳投影光强。图3展示了石膏模型和纸箱的反射率直方图,通过Otsu算法将其分为三个簇,分别对应不同的投影光强值(254、127.5和55)。这一步骤减少了冗余的投影光强数量,提高了测量效率。
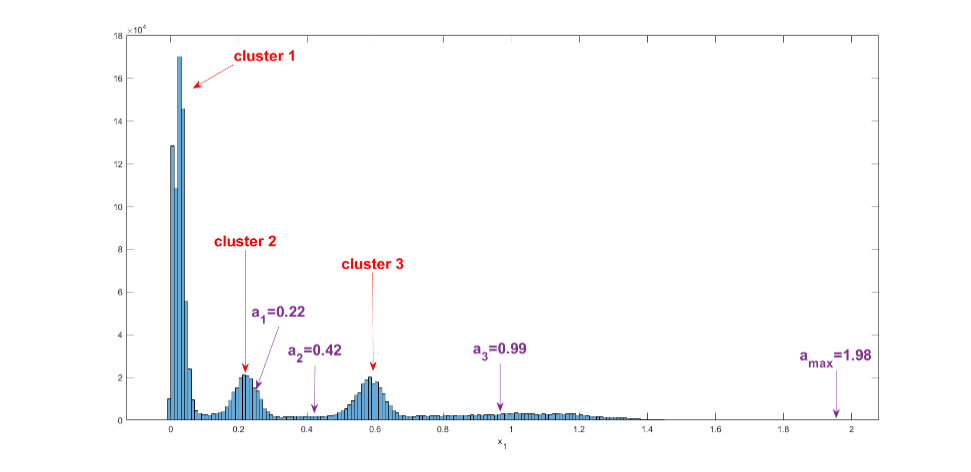
图3 灰度分布柱状图
在确定最佳投影光强后,本文通过投影多组条纹图案,并捕捉原始条纹图像,最终将这些图像像素级合成为高动态范围条纹图像。图4展示了条纹图像的合成过程,首先通过掩码选择每个投影光强下的最佳区域,然后将这些区域叠加生成新的合成条纹图像。并展示了合成条纹图像的三维重建结果,与传统的单一投影光强方法相比此方法生成的合成条纹图像能够有效避免过曝区域,提供更丰富的细节信息。
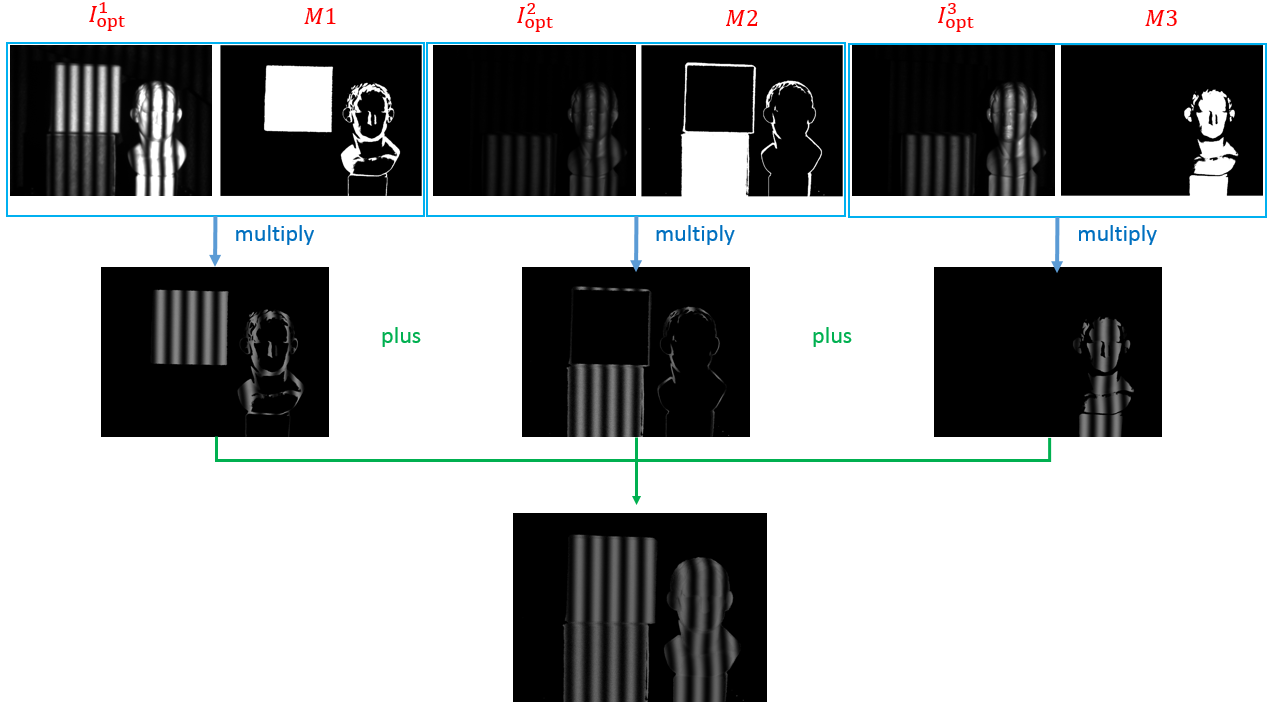
图4 条纹图像合成算法示意图
通过航空航天叶片的测量实验,对比了多种不同方法的测量精度。图5展示了航空航天叶片的测量结果,本文方法在细节还原和测量精度上均优于其他方法(如图6所示)。并且通过对比了三种方法的测量误差,本文方法的误差最小,验证了其在复杂反射率表面测量中的优越性。
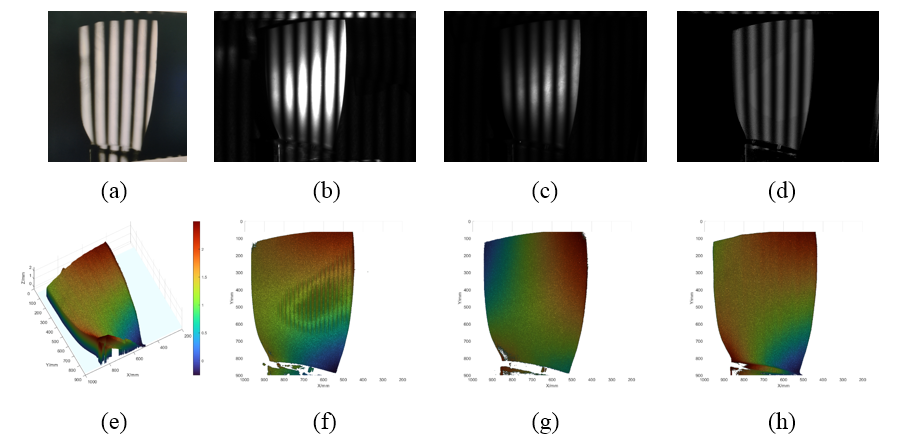
图5 航空叶片重建结果
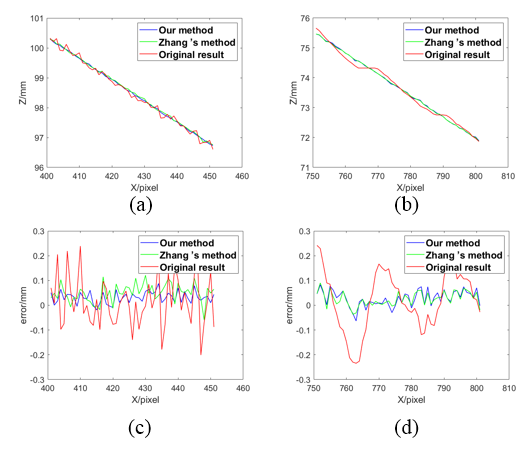
图6 测量数据分析对比
研究结果表明通过引入Otsu多阈值分割算法自适应分类反射率,结合光强合成与相位恢复技术,无需额外硬件即可实现高动态范围(HDR)测量,显著减少了冗余投影光强数量,提升了测量效率,并在复杂场景(如航空航天叶片)中相比传统方法(如Zhang方法)具有更低的测量误差和更优的细节还原能力。
撰稿:郑仁昊
核稿:陈鸣飞

地址:安徽省合肥市双凤工业区凤霞路15号 邮编:231131 联系电话:0551-65658257
Copyright © 2023 安徽理工大学碳中和科学与工程学院 版权所有